In the previous post I talked about an SVM implementation in Matlab. I consider that post and implementation really interesting since it is not easy to find a simple SVM implementation. Instead, I found tons of files which may implement a very interesting algorithm but they are insanely difficult to examine in order to learn about how it works. This is the main reason why I put so much effort on this implementation I developed thanks to the algorithm [1].
First improvement
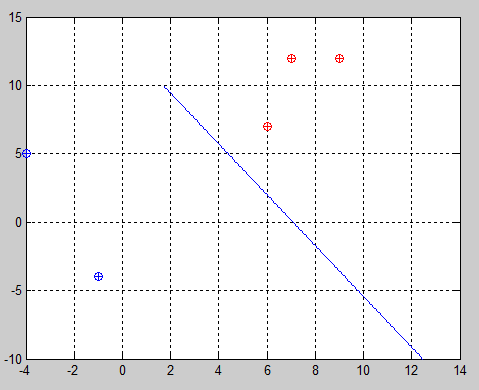
After I implemented that algorithm everything seemed to work:
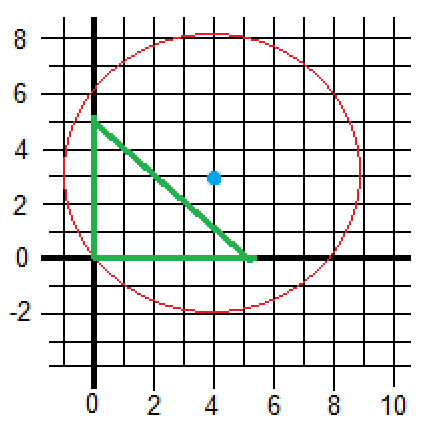
Example 1:

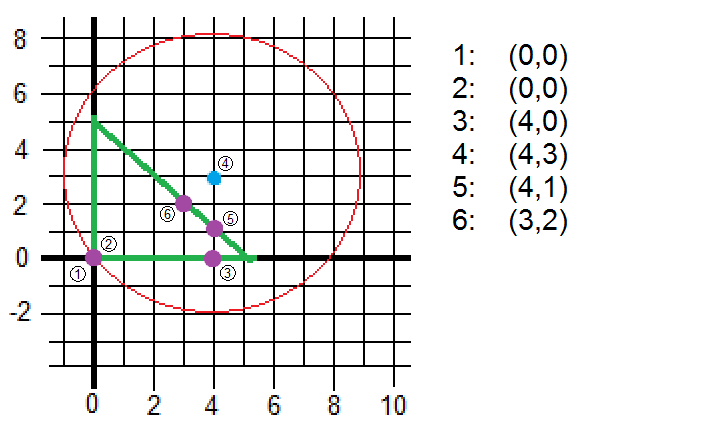
Data points coordinates and target:
Distance to the border from each point: |

Very acceptable results, right? However, when I added more points I experienced an odd behavior.
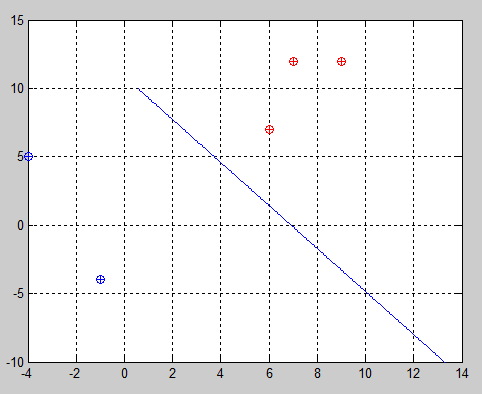
Example 2:

|

It clearly fails at finding the optimum boundary, however, the funny thing here is that the distance between the second and third point and the boundary are the same. This means that the rest of the samples were ignored and the algorithm focused only on those two. Actually, 

After debugging the code everything seemed to be right according to the algorithm I followed [1] but after many trials I saw what definitely brought me to discover the error. In my trial the first two elements belong to class -1 whereas the rest of them belong to the other one. As you can see in the following examples, when I changed the order of the elements in the second class I got that the boundary was different depending only on the first element of the second class, ergo, the third sample.
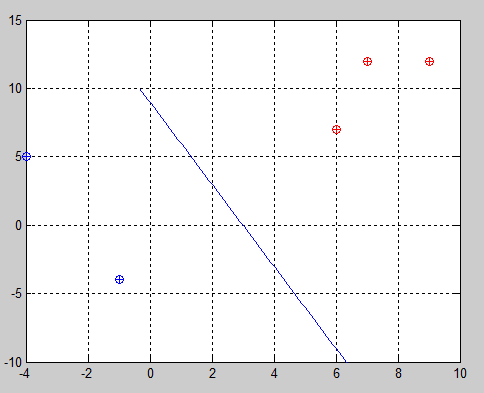
Example 3:

|

Example 4:

|

In this last trial we get the best solution because in this case the algorithm has to focus on the third sample which is the closest one to the other class. However, this is not always true, so I had the need of fixing it. The fix is very simple but was not easy to find (at least quickly).
When I was debugging the code, I realized that in the first loop (iterating over 
If the samples were not encountered on the 


Thus, the fix in the Matlab code was pretty simple: changing from “break” to “continue“. Break allows to stop iterating over the loop and therefore it continues in the outer loop whereas continue makes the current loop stop and start iterating over the next value in that loop.
Second improvement
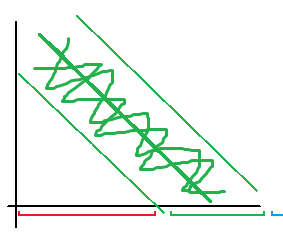
After the first improvement was implemented, it seemed that it worked for many trials, but when I tried more complex examples, it failed again.
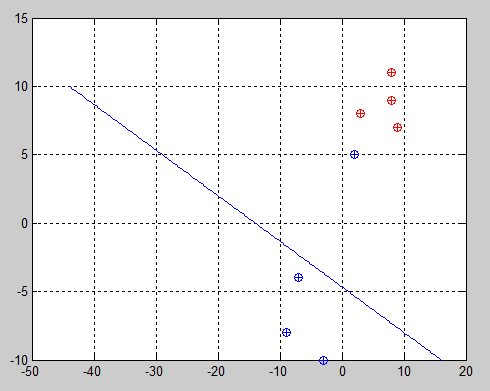

|
The original algorithm [1] uses the variable 

When the algorithm iterates once, alphas are updated such that nonzero alphas correspond to the samples that will help building the boundary. In this example, after the first iteration, alpha values correspond to this:

Therefore, in the next iteration it will update the samples to focus only in sample #3 and sample #6. After this implementation was done, all the trials I tried worked perfectly. This is the result of the same problem:

Algorithm
This is the algorithm [1] after both improvements:
Initialize
Initialize
Calculate 


![\text{while} ((\exists x \in \alpha | x = 0 ) \text{ } \& \& \text{ } (\text{counter} < \text{max\_iter})) [/latex] <span style="margin-left:20px">Initialize input and [latex]\alpha](https://s0.wp.com/latex.php?latex=%5Ctext%7Bwhile%7D+%28%28%5Cexists+x+%5Cin+%5Calpha+%7C+x+%3D+0+%29+%5Ctext%7B+%7D+%5C%26+%5C%26+%5Ctext%7B+%7D+%28%5Ctext%7Bcounter%7D+%3C+%5Ctext%7Bmax%5C_iter%7D%29%29+%26%2391%3B%2Flatex%26%2393%3B+%3Cspan+style%3D%22margin-left%3A20px%22%3EInitialize+input+and+%5Blatex%5D%5Calpha&bg=ffffff&fg=000&s=0&c=20201002)


Calculate 
Save old 
Compute 

Continue to
Compute 
Continue to
Compute and clip new value for 
Determine value for 
Compute 

Compute 





![\text{if } (| \alpha_j - \alpha_j^{(old)} < 10^{-5})[/latex] <b>(*A*)</b></span><br /> <span style="margin-left:100px">Continue to [latex]\text{next j}](https://s0.wp.com/latex.php?latex=%5Ctext%7Bif+%7D+%28%7C+%5Calpha_j+-+%5Calpha_j%5E%7B%28old%29%7D+%3C+10%5E%7B-5%7D%29%26%2391%3B%2Flatex%26%2393%3B+%3Cb%3E%28%2AA%2A%29%3C%2Fb%3E%3C%2Fspan%3E%3Cbr+%2F%3E+%3Cspan+style%3D%22margin-left%3A100px%22%3EContinue+to+%5Blatex%5D%5Ctext%7Bnext+j%7D&bg=ffffff&fg=000&s=0&c=20201002)




Algorithm Legend
(*A*): If the difference between the new 
(*B*): Useful data are those samples whose
(2):
(10):
(11):
(12):
(14):
(15): 
\alpha_j \quad \text{if } L \leq \alpha_j \leq H \\
L \quad \text{if } \alpha_j < L \end{cases}[/latex]
(16): [latex]\alpha_i := \alpha_i + y^{(i)} y^{(j)} (\alpha_j^{(old)} - \alpha_j)[/latex]
(17): [latex]b_1 = b - E_i - y^{(i)} (\alpha_i^{(old)} - \alpha_i) \langle x^{(i)},x^{(i)} \rangle - y^{(j)} (\alpha_j^{(old)} - \alpha_j) \langle x^{(i)},x^{(j)} \rangle[/latex]
(18): [latex]b_2 = b - E_j - y^{(i)} (\alpha_i^{(old)} - \alpha_i) \langle x^{(i)},x^{(j)} \rangle - y^{(j)} (\alpha_j^{(old)} - \alpha_j) \langle x^{(j)},x^{(j)} \rangle[/latex]
(19): [latex]\alpha_j := \begin{cases} b_1 \quad \quad \text{if } 0 < \alpha_i < C \\
b_2 \quad \quad \text{if } 0 < \alpha_j < C \\
(b_1 + b_2)/2 \quad \text{otherwise} \end{cases}[/latex]
The code is provided in the Source code section.





References
1. The Simplified SMO Algorithm http://cs229.stanford.edu/materials/smo.pdf




 (we will only take into account these constraints).
(we will only take into account these constraints).


 , so we have to deal with the first two constraints. KKT method is used since it calculates the Lagrangian multipliers.
, so we have to deal with the first two constraints. KKT method is used since it calculates the Lagrangian multipliers.
 indicates the next point the algorithm will iterate.
indicates the next point the algorithm will iterate.

 and move to the next value
and move to the next value 

![A = \begin{bmatrix}<br /> 0 & -1<br /> \end{bmatrix} \quad b = [0]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbegin%7Bbmatrix%7D%3Cbr+%2F%3E++++++++0+%26+-1%3Cbr+%2F%3E++++++%5Cend%7Bbmatrix%7D+%5Cquad+b+%3D+%5B0%5D&bg=ffffff&fg=000&s=0&c=20201002)




![A = [] \quad b = []](https://s0.wp.com/latex.php?latex=A+%3D+%5B%5D+%5Cquad+b+%3D+%5B%5D&bg=ffffff&fg=000&s=0&c=20201002)








![A = \begin{bmatrix}<br /> 1 & 1<br /> \end{bmatrix} \quad b = [5]](https://s0.wp.com/latex.php?latex=A+%3D+%5Cbegin%7Bbmatrix%7D%3Cbr+%2F%3E++++++++1+%26+1%3Cbr+%2F%3E++++++%5Cend%7Bbmatrix%7D+%5Cquad+b+%3D+%5B5%5D&bg=ffffff&fg=000&s=0&c=20201002)



 , and repeat this until convergence. The algorithm iterates over all
, and repeat this until convergence. The algorithm iterates over all  we have that for a pair of
we have that for a pair of  . This confines optimization to be as the following lines show:
. This confines optimization to be as the following lines show:
 (assuming that
(assuming that  )
)
![L = \frac{1}{2} \| w \| ^2 - \sum \alpha_i [y_i (\overrightarrow{w} \cdot \overrightarrow{x_i} +b)-1] = \sum \alpha_i - \frac{1}{2} \sum_i \sum_j \alpha_i \alpha_j y_i y_j \overrightarrow{x_i} \cdot \overrightarrow{x_j}](https://s0.wp.com/latex.php?latex=L+%3D+%5Cfrac%7B1%7D%7B2%7D+%5C%7C+w+%5C%7C+%5E2+-+%5Csum+%5Calpha_i+%5By_i+%28%5Coverrightarrow%7Bw%7D+%5Ccdot+%5Coverrightarrow%7Bx_i%7D+%2Bb%29-1%5D+%3D+%5Csum+%5Calpha_i+-+%5Cfrac%7B1%7D%7B2%7D+%5Csum_i+%5Csum_j+%5Calpha_i+%5Calpha_j+y_i+y_j+%5Coverrightarrow%7Bx_i%7D+%5Ccdot+%5Coverrightarrow%7Bx_j%7D&bg=ffffff&fg=000&s=0&c=20201002)
 and
and 
 and:
and:
 without the first and second
without the first and second 
 . This means that
. This means that  is the output of
is the output of  under old parameters.
under old parameters.
 .
.



 is a constant so it will be added to the
is a constant so it will be added to the  value.
value.
 is applied:
is applied:
 . Now, the formula is reduced to
. Now, the formula is reduced to  . Let us focus on the second part (the coefficient “
. Let us focus on the second part (the coefficient “ “). Remember that
“). Remember that 

 : (mathematical convenience)
: (mathematical convenience)



 . Proof: Let
. Proof: Let  . Then
. Then 


 . This constraint comes from the KKT algorithm.
. This constraint comes from the KKT algorithm.
 , then
, then 
 , then
, then 
![\gamma < C[/latex], then [latex]\text{min} \quad \alpha_2 = 0, \text{max} \quad \alpha_2 = \gamma[/latex]</span><br /> If [latex]s=-1](https://s0.wp.com/latex.php?latex=%5Cgamma+%3C+C%26%2391%3B%2Flatex%26%2393%3B%2C+then+%26%2391%3Blatex%26%2393%3B%5Ctext%7Bmin%7D+%5Cquad+%5Calpha_2+%3D+0%2C+%5Ctext%7Bmax%7D+%5Cquad+%5Calpha_2+%3D+%5Cgamma%26%2391%3B%2Flatex%26%2393%3B%3C%2Fspan%3E%3Cbr+%2F%3E+If+%5Blatex%5Ds%3D-1&bg=ffffff&fg=000&s=0&c=20201002) , then
, then 
 , then
, then 
![\gamma < 0[/latex], then [latex]\text{min} \quad \alpha_2 = - \gamma, \text{max} \quad \alpha_2 = C[/latex]</span></p> <p>In other words: (L = lower bound, H = higher bound)<br /> [latex]<br /> \text{If} \quad y^{(i)} \neq y^{(j)}, L = max(0,\alpha_j - \alpha_i), H = min(C, C+ \alpha_j - \alpha_i) \\<br /> \text{If} \quad y^{(i)} = y^{(j)}, L = max(0,\alpha_i + \alpha_j - C), H = min(C, \alpha_i + \alpha_j)<br />](https://s0.wp.com/latex.php?latex=%5Cgamma+%3C+0%26%2391%3B%2Flatex%26%2393%3B%2C+then+%26%2391%3Blatex%26%2393%3B%5Ctext%7Bmin%7D+%5Cquad+%5Calpha_2+%3D+-+%5Cgamma%2C+%5Ctext%7Bmax%7D+%5Cquad+%5Calpha_2+%3D+C%26%2391%3B%2Flatex%26%2393%3B%3C%2Fspan%3E%3C%2Fp%3E+%3Cp%3EIn+other+words%3A+%28L+%3D+lower+bound%2C+H+%3D+higher+bound%29%3Cbr+%2F%3E+%5Blatex%5D%3Cbr+%2F%3E+%5Ctext%7BIf%7D++%5Cquad+y%5E%7B%28i%29%7D+%5Cneq+y%5E%7B%28j%29%7D%2C+L+%3D+max%280%2C%5Calpha_j+-+%5Calpha_i%29%2C+H+%3D+min%28C%2C+C%2B+%5Calpha_j+-+%5Calpha_i%29+%5C%5C%3Cbr+%2F%3E+%5Ctext%7BIf%7D++%5Cquad+y%5E%7B%28i%29%7D+%3D+y%5E%7B%28j%29%7D%2C+L+%3D+max%280%2C%5Calpha_i+%2B+%5Calpha_j+-+C%29%2C+H+%3D+min%28C%2C+%5Calpha_i+%2B+%5Calpha_j%29%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0&c=20201002)
 , then
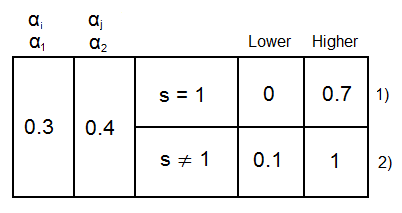
, then  remains always constant. If
remains always constant. If  , then
, then  so they can change as much as they want if they remain equal. In the first case, the numbers are balanced, so if
so they can change as much as they want if they remain equal. In the first case, the numbers are balanced, so if  , as they sum 0.7, they can change maintaining that constraint true, so they may end up being
, as they sum 0.7, they can change maintaining that constraint true, so they may end up being  .
. :
:
 ,
,  . Likewise,
. Likewise, 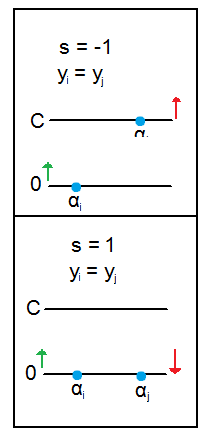
 , it means that we cannot balance or proportionally increase/decrease at all between
, it means that we cannot balance or proportionally increase/decrease at all between  combination and try a new one.
combination and try a new one. (the increment of a variable is given by the increment of all variables which are part of it).
(the increment of a variable is given by the increment of all variables which are part of it).
![E_1^{new} = 0 \text{ if } 0 < \alpha_1^{new} < C \text{(or } E_2^{new} = 0 \text{ if } 0 < \alpha_2^{new} < C \text{)}[/latex] [latex]E (x,y)^{new} = 0 \\ E(x,y)^{old} + \Delta E (x,y) = E (x,y)^{old} + \Delta \alpha_1 y_1 \overrightarrow{x_1}^T \overrightarrow{x} + \Delta \alpha_2 y_2 \overrightarrow{x_2}^T \overrightarrow{x} - \Delta b[/latex] So we have: [latex]\Delta b = E(x,y)^{old} + \Delta \alpha_1 y_1 \overrightarrow{x_1}^T \overrightarrow{x} + \Delta \alpha_2 y_2 \overrightarrow{x_2}^T \overrightarrow{x}[/latex] <h2><a name="alg">Algorithm</a></h2> <p>The code I provide in the <a href="http://laid.delanover.com/source-code/">Source code</a> section was developed by me, but I followed the algorithm shown in [1]. I will copy the algorithm here since it made my life really easier and avoided me many headaches for sure. All the credit definitely goes to the writer.</p> <p><b>Algorithm: Simplified SMO</b><br /> Note: if you check [1] you will see that this algorithm differs from the original one written on that paper. The reason is because the original one had mistakes that I wanted to fix and improve. I talk about that in <a href="http://laid.delanover.com/svm-algorithm-improvements/">this post</a>.</p> <p><b>Input:</b><br /> <span style="margin-left:20px">C: regularization parameter</span><br /> <span style="margin-left:20px">tol: numerical tolerance</span><br /> <span style="margin-left:20px">max_passes: max # of times to iterate over [latex]\alpha](https://s0.wp.com/latex.php?latex=E_1%5E%7Bnew%7D+%3D+0+%5Ctext%7B+if+%7D+0+%3C+%5Calpha_1%5E%7Bnew%7D+%3C+C+%5Ctext%7B%28or+%7D+E_2%5E%7Bnew%7D+%3D+0+%5Ctext%7B+if+%7D+0+%3C+%5Calpha_2%5E%7Bnew%7D+%3C+C+%5Ctext%7B%29%7D%26%2391%3B%2Flatex%26%2393%3B++%26%2391%3Blatex%26%2393%3BE+%28x%2Cy%29%5E%7Bnew%7D+%3D+0+%5C%5C+E%28x%2Cy%29%5E%7Bold%7D+%2B+%5CDelta+E+%28x%2Cy%29+%3D+E+%28x%2Cy%29%5E%7Bold%7D+%2B+%5CDelta+%5Calpha_1+y_1+%5Coverrightarrow%7Bx_1%7D%5ET+%5Coverrightarrow%7Bx%7D+%2B+%5CDelta+%5Calpha_2+y_2+%5Coverrightarrow%7Bx_2%7D%5ET+%5Coverrightarrow%7Bx%7D+-+%5CDelta+b%26%2391%3B%2Flatex%26%2393%3B++So+we+have%3A++%26%2391%3Blatex%26%2393%3B%5CDelta+b+%3D+E%28x%2Cy%29%5E%7Bold%7D+%2B+%5CDelta+%5Calpha_1+y_1+%5Coverrightarrow%7Bx_1%7D%5ET+%5Coverrightarrow%7Bx%7D+%2B+%5CDelta+%5Calpha_2+y_2+%5Coverrightarrow%7Bx_2%7D%5ET+%5Coverrightarrow%7Bx%7D%26%2391%3B%2Flatex%26%2393%3B++++%3Ch2%3E%3Ca+name%3D%22alg%22%3EAlgorithm%3C%2Fa%3E%3C%2Fh2%3E+%3Cp%3EThe+code+I+provide+in+the+%3Ca+href%3D%22http%3A%2F%2Flaid.delanover.com%2Fsource-code%2F%22%3ESource+code%3C%2Fa%3E+section+was+developed+by+me%2C+but+I+followed+the+algorithm+shown+in+%5B1%5D.+I+will+copy+the+algorithm+here+since+it+made+my+life+really+easier+and+avoided+me+many+headaches+for+sure.+All+the+credit+definitely+goes+to+the+writer.%3C%2Fp%3E+%3Cp%3E%3Cb%3EAlgorithm%3A+Simplified+SMO%3C%2Fb%3E%3Cbr+%2F%3E+Note%3A+if+you+check+%5B1%5D+you+will+see+that+this+algorithm+differs+from+the+original+one+written+on+that+paper.+The+reason+is+because+the+original+one+had+mistakes+that+I+wanted+to+fix+and+improve.+I+talk+about+that+in+%3Ca+href%3D%22http%3A%2F%2Flaid.delanover.com%2Fsvm-algorithm-improvements%2F%22%3Ethis+post%3C%2Fa%3E.%3C%2Fp%3E+%3Cp%3E%3Cb%3EInput%3A%3C%2Fb%3E%3Cbr+%2F%3E+%3Cspan+style%3D%22margin-left%3A20px%22%3EC%3A+regularization+parameter%3C%2Fspan%3E%3Cbr+%2F%3E+%3Cspan+style%3D%22margin-left%3A20px%22%3Etol%3A+numerical+tolerance%3C%2Fspan%3E%3Cbr+%2F%3E+%3Cspan+style%3D%22margin-left%3A20px%22%3Emax_passes%3A+max+%23+of+times+to+iterate+over+%5Blatex%5D%5Calpha&bg=ffffff&fg=000&s=0&c=20201002) 's without changing
's without changing : training data
: training data : Lagrange for multipliers for solution
: Lagrange for multipliers for solution : threshold for solution
: threshold for solution![\text{while} ((\exists x \in \alpha | x = 0 ) \text{ } \& \& \text{ } (\text{counter} < \text{max\_iter}))[/latex] <span style="margin-left:20px">Initialize input and [latex]alpha](https://s0.wp.com/latex.php?latex=%5Ctext%7Bwhile%7D+%28%28%5Cexists+x+%5Cin+%5Calpha+%7C+x+%3D+0+%29+%5Ctext%7B+%7D+%5C%26+%5C%26+%5Ctext%7B+%7D+%28%5Ctext%7Bcounter%7D+%3C+%5Ctext%7Bmax%5C_iter%7D%29%29%26%2391%3B%2Flatex%26%2393%3B+%3Cspan+style%3D%22margin-left%3A20px%22%3EInitialize+input+and+%5Blatex%5Dalpha&bg=ffffff&fg=000&s=0&c=20201002)
![\alpha_j := \begin{cases} H \quad \text{if } \alpha_j > H \\<br /> \alpha_j \quad \text{if } L \leq \alpha_j \leq H \\<br /> L \quad \text{if } \alpha_j < L \end{cases}[/latex] (16): [latex]\alpha_i := \alpha_i + y^{(i)} y^{(j)} (\alpha_j^{(old)} - \alpha_j)[/latex] (17): [latex]b_1 = b - E_i - y^{(i)} (\alpha_i^{(old)} - \alpha_i) \langle x^{(i)},x^{(i)} \rangle - y^{(j)} (\alpha_j^{(old)} - \alpha_j) \langle x^{(i)},x^{(j)} \rangle[/latex] (18): [latex]b_2 = b - E_j - y^{(i)} (\alpha_i^{(old)} - \alpha_i) \langle x^{(i)},x^{(j)} \rangle - y^{(j)} (\alpha_j^{(old)} - \alpha_j) \langle x^{(j)},x^{(j)} \rangle[/latex] (19): [latex]\alpha_j := \begin{cases} b_1 \quad \quad \text{if } 0 < \alpha_i < C \\ b_2 \quad \quad \text{if } 0 < \alpha_j < C \\ (b_1 + b_2)/2 \quad \text{otherwise} \end{cases}[/latex] <h4>Source Code Legend</h4> <p>(*1*): This error function arises when we try to see the difference between our output and the target: [latex]E_i = f(x_i) - y_i = \overrightarrow{w}^T \overrightarrow{x_i}](https://s0.wp.com/latex.php?latex=%5Calpha_j+%3A%3D+%5Cbegin%7Bcases%7D+H+%5Cquad+%5Ctext%7Bif+%7D+%5Calpha_j+%3E+H+%5C%5C%3Cbr+%2F%3E+%5Calpha_j+%5Cquad+%5Ctext%7Bif+%7D+L+%5Cleq+%5Calpha_j+%5Cleq+H+%5C%5C%3Cbr+%2F%3E+L+%5Cquad+%5Ctext%7Bif+%7D+%5Calpha_j+%3C+L+%5Cend%7Bcases%7D%26%2391%3B%2Flatex%26%2393%3B+%2816%29%3A+%26%2391%3Blatex%26%2393%3B%5Calpha_i+%3A%3D+%5Calpha_i+%2B+y%5E%7B%28i%29%7D+y%5E%7B%28j%29%7D+%28%5Calpha_j%5E%7B%28old%29%7D+-+%5Calpha_j%29%26%2391%3B%2Flatex%26%2393%3B+%2817%29%3A+%26%2391%3Blatex%26%2393%3Bb_1+%3D+b+-+E_i+-+y%5E%7B%28i%29%7D+%28%5Calpha_i%5E%7B%28old%29%7D+-+%5Calpha_i%29+%5Clangle+x%5E%7B%28i%29%7D%2Cx%5E%7B%28i%29%7D+%5Crangle+-+y%5E%7B%28j%29%7D+%28%5Calpha_j%5E%7B%28old%29%7D+-+%5Calpha_j%29+%5Clangle+x%5E%7B%28i%29%7D%2Cx%5E%7B%28j%29%7D+%5Crangle%26%2391%3B%2Flatex%26%2393%3B+%2818%29%3A+%26%2391%3Blatex%26%2393%3Bb_2+%3D+b+-+E_j+-+y%5E%7B%28i%29%7D+%28%5Calpha_i%5E%7B%28old%29%7D+-+%5Calpha_i%29+%5Clangle+x%5E%7B%28i%29%7D%2Cx%5E%7B%28j%29%7D+%5Crangle+-+y%5E%7B%28j%29%7D+%28%5Calpha_j%5E%7B%28old%29%7D+-+%5Calpha_j%29+%5Clangle+x%5E%7B%28j%29%7D%2Cx%5E%7B%28j%29%7D+%5Crangle%26%2391%3B%2Flatex%26%2393%3B+%2819%29%3A+%26%2391%3Blatex%26%2393%3B%5Calpha_j+%3A%3D+%5Cbegin%7Bcases%7D+b_1+%5Cquad+%5Cquad+%5Ctext%7Bif+%7D+0+%3C+%5Calpha_i+%3C+C+%5C%5C+b_2+%5Cquad+%5Cquad+%5Ctext%7Bif+%7D+0+%3C+%5Calpha_j+%3C+C++%5C%5C+%28b_1+%2B+b_2%29%2F2+%5Cquad+%5Ctext%7Botherwise%7D+%5Cend%7Bcases%7D%26%2391%3B%2Flatex%26%2393%3B++++%3Ch4%3ESource+Code+Legend%3C%2Fh4%3E+%3Cp%3E%28%2A1%2A%29%3A+This+error+function+arises+when+we+try+to+see+the+difference+between+our+output+and+the+target%3A+%5Blatex%5DE_i+%3D+f%28x_i%29+-+y_i+%3D+%5Coverrightarrow%7Bw%7D%5ET+%5Coverrightarrow%7Bx_i%7D&bg=ffffff&fg=000&s=0&c=20201002) and as
and as  we get that
we get that 

![W = [0.3333 0 -0.3333] \to f(x,y,z) = x-z](https://s0.wp.com/latex.php?latex=W+%3D+%5B0.3333+0+-0.3333%5D+%5Cto+f%28x%2Cy%2Cz%29+%3D+x-z&bg=ffffff&fg=000&s=0&c=20201002)
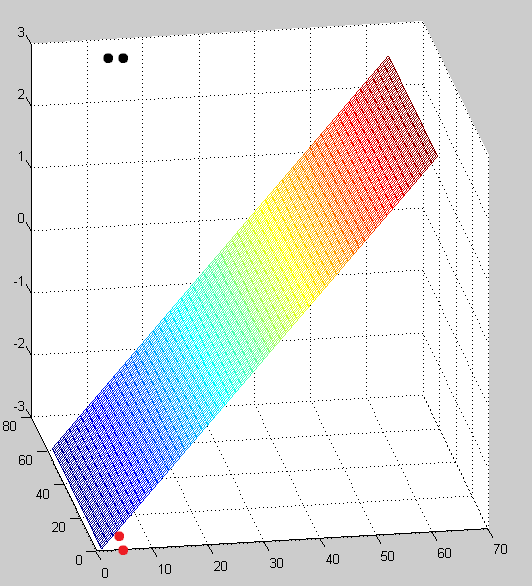
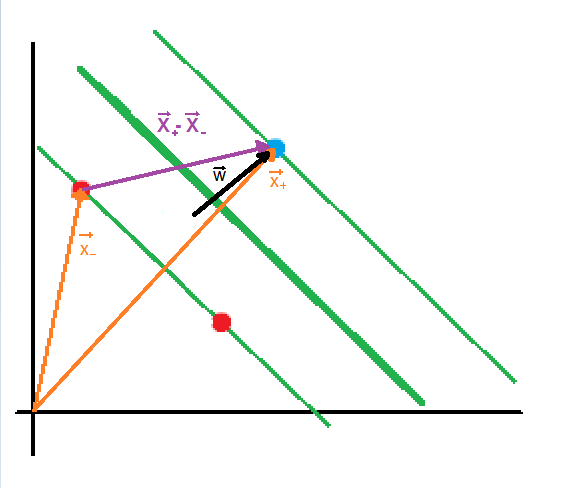
 is a perpendicular vector to the boundary, but since boundary’s coefficients are unknown,
is a perpendicular vector to the boundary, but since boundary’s coefficients are unknown,  because we have its coordinates (sample’s coordinates).
because we have its coordinates (sample’s coordinates).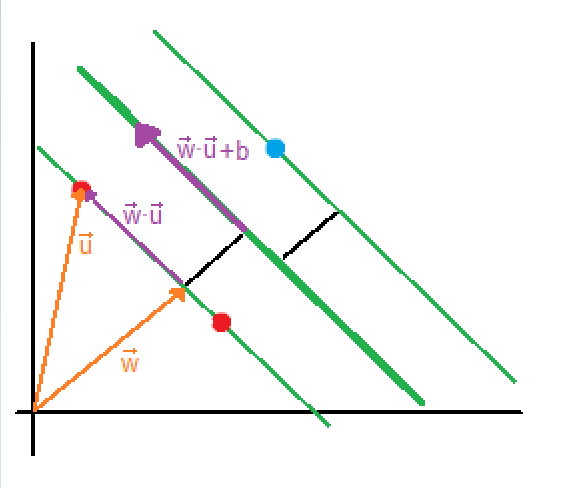


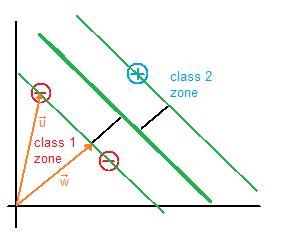
 is a positive sample (class A) and
is a positive sample (class A) and  is a negative sample (class B).
is a negative sample (class B).


 so that the values that fulfill this, fall in between the two regions as depicted (green zone).
so that the values that fulfill this, fall in between the two regions as depicted (green zone).
 on
on 
 and
and  so that:
so that:

 which is the same as minimizing
which is the same as minimizing  or, to make it more mathematically convenient,
or, to make it more mathematically convenient, 
 ), so Lagrange is applied. In case you want to know more about Lagrange multipliers, you can check
), so Lagrange is applied. In case you want to know more about Lagrange multipliers, you can check ![L = \frac{1}{2}\| w \|^2 - \sum \alpha_i [ y_i (\overrightarrow{w} \cdot \overrightarrow{x_i} +b)-1]](https://s0.wp.com/latex.php?latex=L+%3D+%5Cfrac%7B1%7D%7B2%7D%5C%7C+w+%5C%7C%5E2+-+%5Csum+%5Calpha_i+%5B+y_i+%28%5Coverrightarrow%7Bw%7D+%5Ccdot+%5Coverrightarrow%7Bx_i%7D+%2Bb%29-1%5D&bg=ffffff&fg=000&s=0&c=20201002)






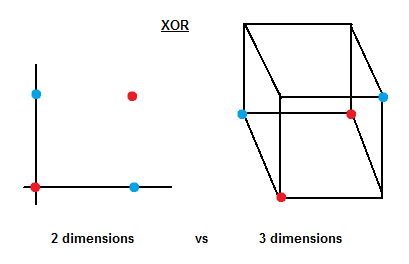
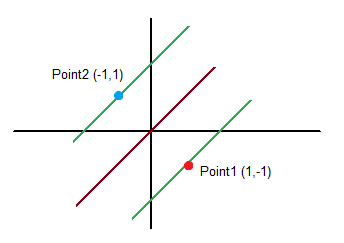
![x = [-1,1]](https://s0.wp.com/latex.php?latex=x+%3D+%5B-1%2C1%5D&bg=ffffff&fg=000&s=0&c=20201002)

![x = [1,-1]](https://s0.wp.com/latex.php?latex=x+%3D+%5B1%2C-1%5D&bg=ffffff&fg=000&s=0&c=20201002)









![\overrightarrow{w} = \sum_{i=1}^N \alpha_i y_i x_i = \frac{1}{4} * 1 * [-1,1] + \frac{1}{4} * -1 * [1,-1] = [\frac{-1}{4} , \frac{1}{4}] + [\frac{-1}{4} , \frac{1}{4}] = [\frac{-2}{4} , \frac{2}{4}] = [\frac{-1}{2} , \frac{1}{2}]](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7Bw%7D+%3D+%5Csum_%7Bi%3D1%7D%5EN+%5Calpha_i+y_i+x_i+%3D+%5Cfrac%7B1%7D%7B4%7D+%2A+1+%2A+%5B-1%2C1%5D+%2B+%5Cfrac%7B1%7D%7B4%7D+%2A+-1+%2A+%5B1%2C-1%5D+%3D+%5B%5Cfrac%7B-1%7D%7B4%7D+%2C+%5Cfrac%7B1%7D%7B4%7D%5D+%2B+%5B%5Cfrac%7B-1%7D%7B4%7D+%2C+%5Cfrac%7B1%7D%7B4%7D%5D+%3D+%5B%5Cfrac%7B-2%7D%7B4%7D+%2C+%5Cfrac%7B2%7D%7B4%7D%5D+%3D+%5B%5Cfrac%7B-1%7D%7B2%7D+%2C+%5Cfrac%7B1%7D%7B2%7D%5D&bg=ffffff&fg=000&s=0&c=20201002)
![\alpha [y_i (\overrightarrow{w}^T\overrightarrow{x_i} +b) -1] = 0 \quad \to \quad \alpha_i y_i \overrightarrow{w}^T\overrightarrow{x_i} + \alpha_i b y_i - \alpha_i = 0 \\<br /> b = \frac{1-y_i \overrightarrow{w}^T\overrightarrow{x_i}}{y_i} \quad \to \quad b = \frac{1}{y_i} - \overrightarrow{w}^T\overrightarrow{x_i}](https://s0.wp.com/latex.php?latex=%5Calpha+%5By_i+%28%5Coverrightarrow%7Bw%7D%5ET%5Coverrightarrow%7Bx_i%7D+%2Bb%29+-1%5D+%3D+0+%5Cquad+%5Cto+%5Cquad+%5Calpha_i+y_i+%5Coverrightarrow%7Bw%7D%5ET%5Coverrightarrow%7Bx_i%7D+%2B+%5Calpha_i+b+y_i+-+%5Calpha_i+%3D+0+%5C%5C%3Cbr+%2F%3E+b+%3D+%5Cfrac%7B1-y_i+%5Coverrightarrow%7Bw%7D%5ET%5Coverrightarrow%7Bx_i%7D%7D%7By_i%7D+%5Cquad+%5Cto+%5Cquad+b+%3D+%5Cfrac%7B1%7D%7By_i%7D+-+%5Coverrightarrow%7Bw%7D%5ET%5Coverrightarrow%7Bx_i%7D&bg=ffffff&fg=000&s=0&c=20201002)
![<br /> \text{for i=1} \\<br /> \text{ } \hspace{3em} b = 1 -[(-1,1) \cdot (\frac{-1}{2},\frac{1}{2})] = 0 \\<br /> \text{for i=2} \\<br /> \text{ } \hspace{3em} b = - 1 -[(1,-1) \cdot (\frac{-1}{2},\frac{1}{2})] = 0<br /> \vspace{3em}<br /> \text{ }](https://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Ctext%7Bfor+i%3D1%7D+%5C%5C%3Cbr+%2F%3E+%5Ctext%7B+%7D+%5Chspace%7B3em%7D+b+%3D+1+-%5B%28-1%2C1%29+%5Ccdot+%28%5Cfrac%7B-1%7D%7B2%7D%2C%5Cfrac%7B1%7D%7B2%7D%29%5D+%3D+0+%5C%5C%3Cbr+%2F%3E+%5Ctext%7Bfor+i%3D2%7D+%5C%5C%3Cbr+%2F%3E+%5Ctext%7B+%7D+%5Chspace%7B3em%7D+b+%3D+-+1+-%5B%281%2C-1%29+%5Ccdot+%28%5Cfrac%7B-1%7D%7B2%7D%2C%5Cfrac%7B1%7D%7B2%7D%29%5D+%3D+0%3Cbr+%2F%3E+%5Cvspace%7B3em%7D%3Cbr+%2F%3E+%5Ctext%7B+%7D&bg=ffffff&fg=000&s=0&c=20201002)


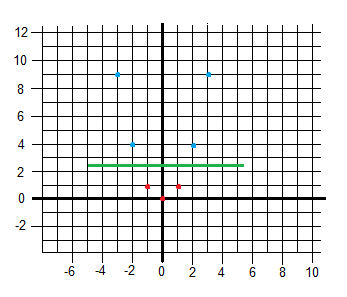
![x = [-1,-1]](https://s0.wp.com/latex.php?latex=x+%3D+%5B-1%2C-1%5D&bg=ffffff&fg=000&s=0&c=20201002)
![x = [2,0]](https://s0.wp.com/latex.php?latex=x+%3D+%5B2%2C0%5D&bg=ffffff&fg=000&s=0&c=20201002)
![x = [3,1]](https://s0.wp.com/latex.php?latex=x+%3D+%5B3%2C1%5D&bg=ffffff&fg=000&s=0&c=20201002)
 and
and  . The second number is the dot product between the two coordinates
. The second number is the dot product between the two coordinates  .
.

![w = 1*-1*[-1,-1] + 3*1*[2,0] - 2*1*[3,1] = [1,-1] \\<br /> b_1 = b_2 = b_3 = -1](https://s0.wp.com/latex.php?latex=w+%3D+1%2A-1%2A%5B-1%2C-1%5D+%2B+3%2A1%2A%5B2%2C0%5D+-+2%2A1%2A%5B3%2C1%5D+%3D+%5B1%2C-1%5D+%5C%5C%3Cbr+%2F%3E+b_1+%3D+b_2+%3D+b_3+%3D+-1&bg=ffffff&fg=000&s=0&c=20201002)

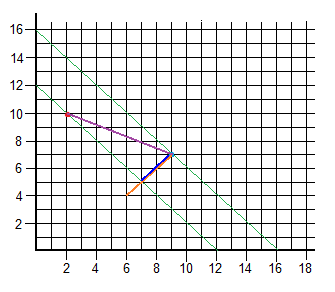
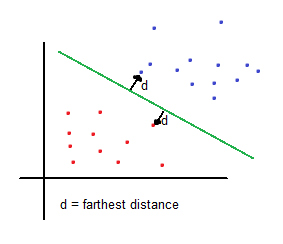
![R = [2,10] \quad \text{(red)} \\<br /> B = [9,7] \quad \text{(blue)} \\<br /> \overrightarrow{RB} = (7,-3)](https://s0.wp.com/latex.php?latex=R+%3D+%5B2%2C10%5D+%5Cquad+%5Ctext%7B%28red%29%7D+%5C%5C%3Cbr+%2F%3E+B+%3D+%5B9%2C7%5D+%5Cquad+%5Ctext%7B%28blue%29%7D+%5C%5C%3Cbr+%2F%3E+%5Coverrightarrow%7BRB%7D+%3D+%287%2C-3%29&bg=ffffff&fg=000&s=0&c=20201002)
 (which by the way, is the perpendicular of both green lines). The result is the blue vector which is over the orange one within the green region.
(which by the way, is the perpendicular of both green lines). The result is the blue vector which is over the orange one within the green region.

![[9-2,7-2] \to [7,5]](https://s0.wp.com/latex.php?latex=%5B9-2%2C7-2%5D+%5Cto+%5B7%2C5%5D+&bg=ffffff&fg=000&s=0&c=20201002)
 subject to
subject to  .
.  and
and  need to have continuous first partial derivatives.
need to have continuous first partial derivatives.
 is a maximum of
is a maximum of  such that
such that  is a stationary point for Lagrange function (so
is a stationary point for Lagrange function (so  is 0).
is 0).
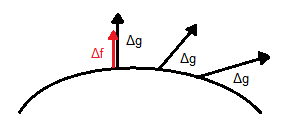
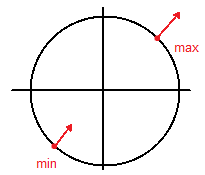
 whose gradient is
whose gradient is  and it is perpendicular to the whole surface. We try to find its maxima whose gradient should theoretically be perpendicular as well. Let us not forget the relationship between the first derivative and the gradient. Hence we can say that the gradient of
and it is perpendicular to the whole surface. We try to find its maxima whose gradient should theoretically be perpendicular as well. Let us not forget the relationship between the first derivative and the gradient. Hence we can say that the gradient of  and the gradient of
and the gradient of  are pointing in the same direction so:
are pointing in the same direction so:  (proportional).
(proportional).  on unit circle
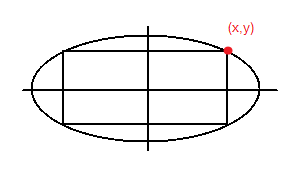
on unit circle 



 . We want to maximize the perimeter which is
. We want to maximize the perimeter which is  subject to
subject to 

 (we take the positive because it is a maximum),
(we take the positive because it is a maximum),



 and
and  :
:
You must be logged in to post a comment.