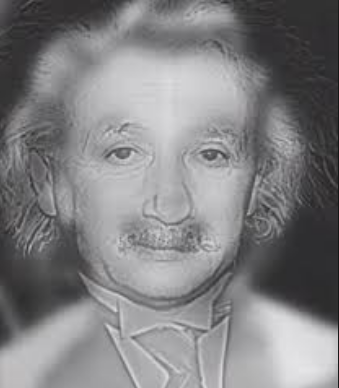
There is an Einstein-Monroe picture wandering around the Internet that I recently saw. It can be a nice example of how human vision works as well as building a high and low pass filter from scratch in order to extract both images.
This picture includes a low frequency picture of Monroe and a high frequency picture of Einstein blended together. Human vision notices details of its environment when objects are close (high frequency). That means that when we are close enough (a normal distance) to this picture, we should be able to see Einstein’s face, otherwise you should check your sight. If you take 3 steps back and see the same picture, you should be seeing Monroe’s face because your vision is not able anymore to get the small details of the picture. Instead, it will get a general idea of the picture (a bit blurry).
Since this is about high and low frequency pictures, we can build high and low pass filters to extract the frequency of the image we want. Thus each original image is theoretically possible to be extracted.
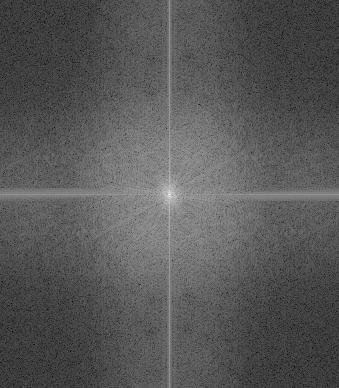
First of all, we can see how the Fast Fourier transform looks like. In order to achieve it, we have to perform the 2-D Fast Fourier, shift it, and scale it.
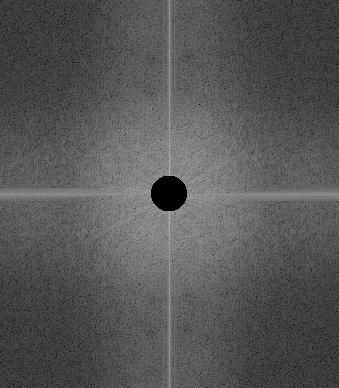
The low frequency data of the image is in the center of the previous image. Thus a simply low-pass filter can be built by keeping the center and removing the rest, as this picture shows. If we want to extract the opposite, we can invert it.
Low-pass filter
High-pass filter
The radius of the circle needs to be manually adjusted depending on the output. When we try to rebuilt the image using both of those Fourier Transform, we get the original images.
Low frequency image
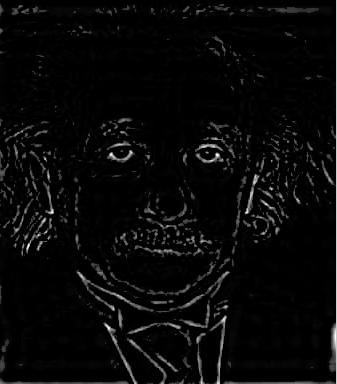
High frequency image
Since in my secondary screen I can barely see Einstein’s face, I tried to increase the contrast to make it easier to see in case you have the same issue.
One of the simplest methods to extract features from a picture is by subtracting and thresholding. Imagine that from a static background we want to get any figure that appears in front. For instance, let us say that we want to measure the height of different people who will lean against a wall. At first, the background (the wall) is observed. Then, someone will appear, and later, by subtracting the new picture from the background we will be able to extract the person who appeared. After that, it will not be difficult to guess the height. The thresholding operation comes from the fact that we have to decide how strong is the change to consider that it indeed changed.
The most impressive advantage of this method is that it is really easy to implement and fast, similar to the temporal median which can actually be used to generate the background. The biggest drawback is that it is very sensitive to noise and luminosity changes as we will see.
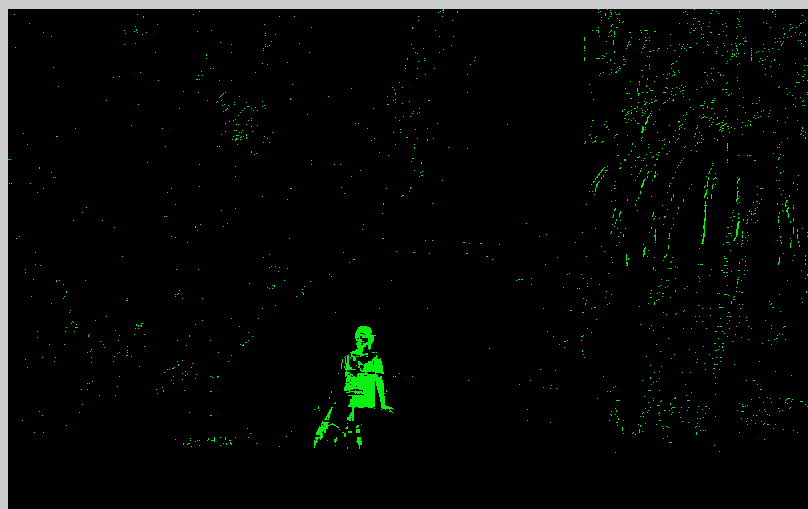
And these are the results after applying thresholding and subtraction. The first picture has a lot of noise as you can see, but I think is very easy to remove in this case. I think this noise comes from that when these pictures were taken, there was a bit of wind and pixels are not exactly the same. In order to remove the noise, in the second attempt I firstly used a Gaussian filter. By the way, both pictures were converted first to gray scale to make it simple and faster since the background and foreground will be in a different color, although Gaussian took really long compared to the first one. In any case, in the original image my right arm is almost blended with the background. That is why it is not well detected.
Simple thresholding and subtracting
Using a Gaussian filter first
When subtracting you can be very imaginative and try different things depending on the background, foreground and the application:
a) Having single thresholds for each color channel
b) Having a global threshold made from the sum of the subtracting of each channel
c) Combining a) and b)
d) Using gray scale
e) Applying a template convolution (Gaussian or any other)
f) Check out the neighborhood
and so on.
I wanted to try out how to use the webcam to process and show the results “in real time”, although my computer does not compute very fast and I took a picture every 1 or 1.5 seconds, but it is still interesting. I also wrote a post about how to take pictures from the webcam with Matlab.
This is the algorithm of the code I made
Initialize webcam, max_times
Wait 2 seconds before taking a picture of the background (to let me hide)
Take a picture of the background
Wait 1 second
while max_times>=0 Take a picture result = blackPicture (background color) Iterate over each pixel (y,x) If background(y,x,redChannel) – picture(y,x,redChannel) > threshold || background(y,x,greenChannel) – picture(y,x,greenChannel) > threshold || background(y,x,blueChannel) – picture(y,x,blueChannel) > threshold result(x,y,channels) = newColor End if Show picture (or store it) Decrease max_times
Results
Some times we can see that the whole area is green. This is because the luminosity changes depending on where the camera is focusing, and the focus changes depending on where the camera detects something. As the luminosity of the whole picture changes, everything turns to green. Shadows also make the luminosity change.
An example of how luminosity changes depending on where the webcam is focused.
Sarsa is one of the most well-known Temporal Difference algorithms used in Reinforcement Learning. TD algorithms combine Monte Carlo ideas, in that it can learn from raw experience without a model of the environment’s dynamics, with Dynamic Programming ideas, in that their learned estimates are based on previous estimates without the need of waiting for a final outcome [1].
On-policy methods learn the value of the policy that is being used to make decisions, whereas off-policy methods learn from different policies for behavior and estimation [2].
Sarsa algorithm
On the contrary of other RL methods that are mathematically proved to converge, TD convergence depends on the learning rate α. In order to understand this, we only need to imagine the typical downhill image that comes to our minds when dealing with learning rates. If the chosen learning rate is not small enough, the error will go downhill but at some point it will go uphill. As we will see on the simulations I carried on, this may have devastating consequences as messing up the final result. Nonetheless, if the learning rate is not big enough, it won’t reach the optimal solution if we don’t iterate enough.
The algorithm is quite simple, but it’s important to understand it.
Initialize Q(s,a) arbitrarily
Repeat (for each episode):
Initialize s
Choose a from s using a policy derived from Q (e.g., ɛ-greedy)
Repeat (for each step of the episode):
Take action a, observe r, s'
Choose a' from s' using policy derived from Q (e.g., ɛ-greedy)
Q (s,a) ← Q(s,a) + α[r + γQ(s',a') - Q(s,a)]
s ← s'; a ← a'
until s is terminal
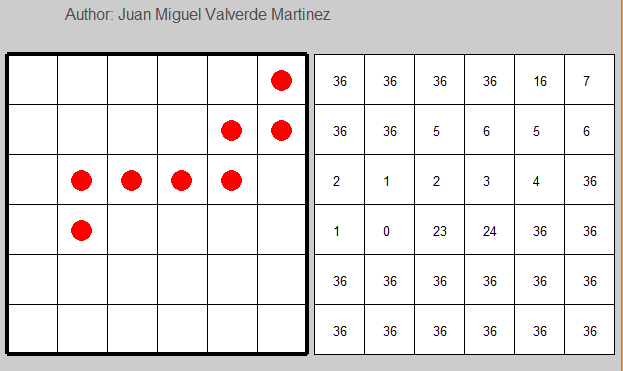
α represents the learning rate, how much does the algorithm learn each iteration. γ represents the discounted reward, how important is the next state. r is the reward the algorithm gets after performing action a from state s leading to state s’. Q(s,a) stores the value of doing action a from state s. There will be 36 states and 4 different actions (1 = going up, 2 = left, 3 = down, 4 = right).
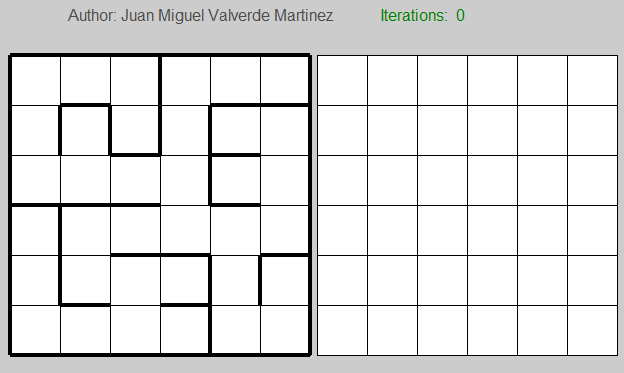
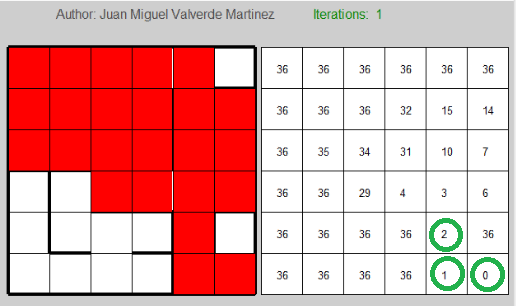
Since I am not using a graphical interface, it is worth mentioning that the numbers in the first grid represent the states, so for this maze, the optimal solution will be: 1 – 7 – 13 – 14 – 15 – 16 – 22 – 23 – 29 – 35 – 36
The algorithm has a certain number of iterations that will allow us to control how far it is going to iterate. I also established a limit of iterations for each general iteration to avoid getting stuck. In all cases I tried with γ = 1, so I consider really important the next state. In contrast, I tried with different learning rates.
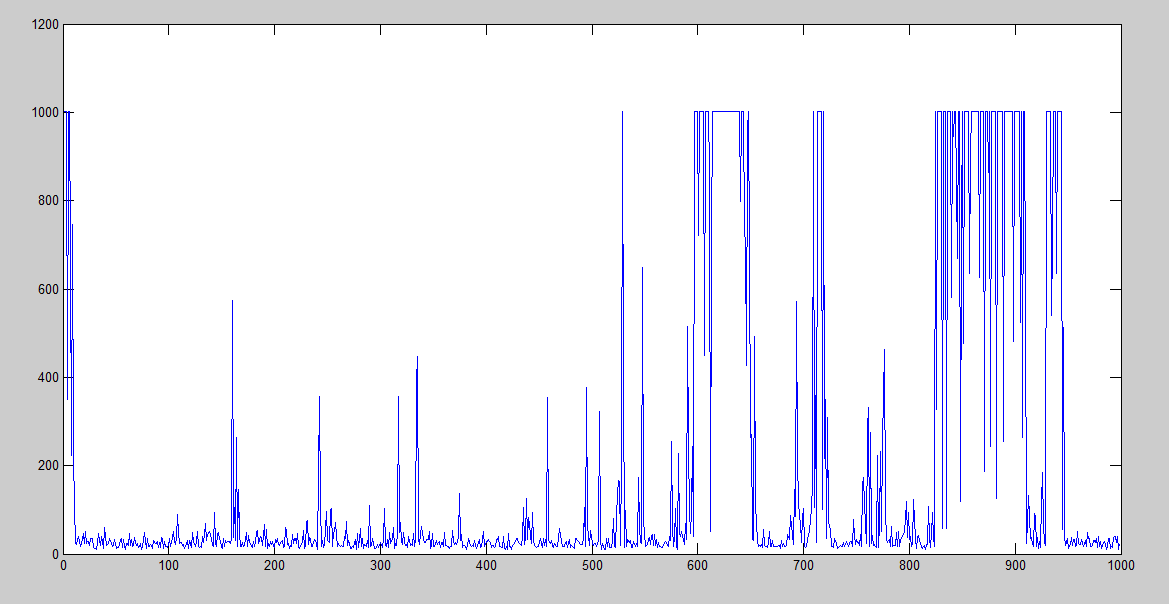
Learning rate = 0.5
We can clearly see that it starts with many iterations, but it decreases very soon. However, after it starts increasing the iterations, it gets worse and worse. We can actually see that it surpassed the limit of 1000 iterations many times.
Learning rate = 0.3
Here it is slightly better, but still terribly bad after the 150th iteration approx.
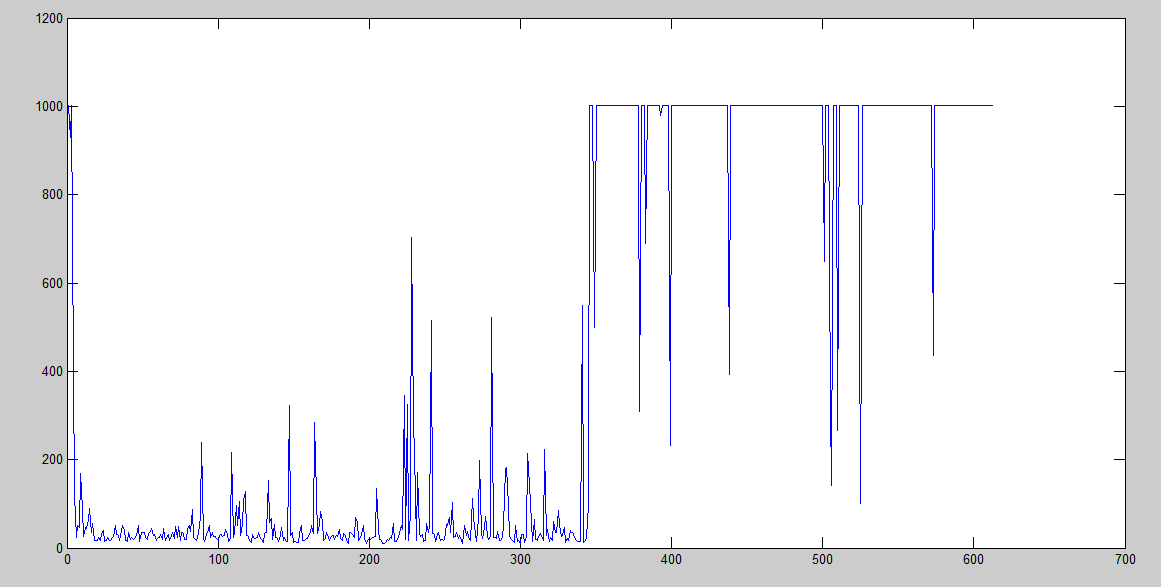
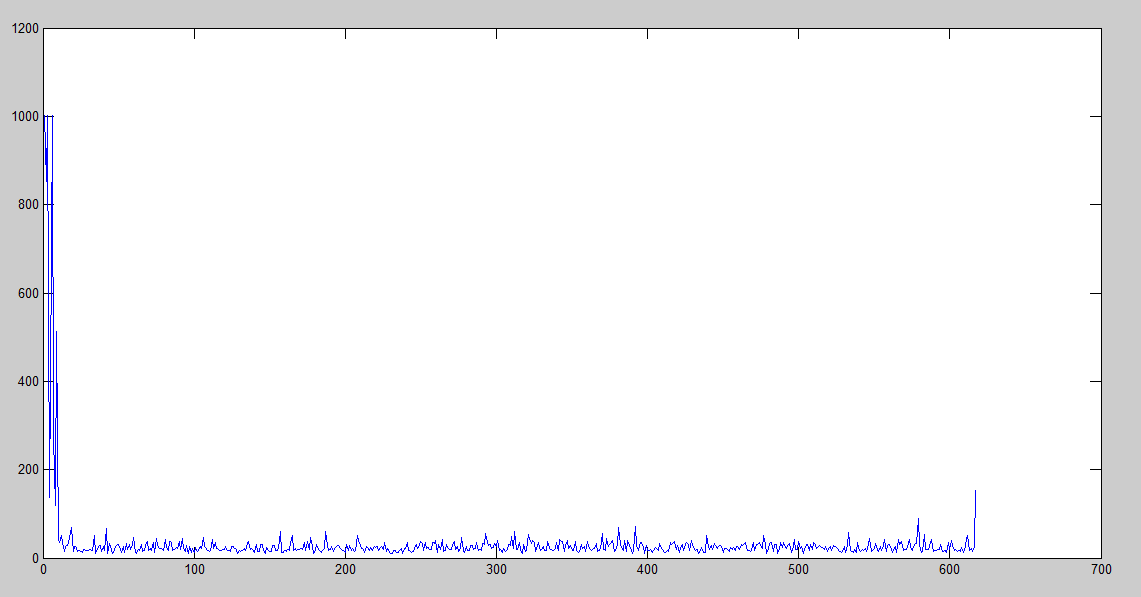
Learning rate = 0.1
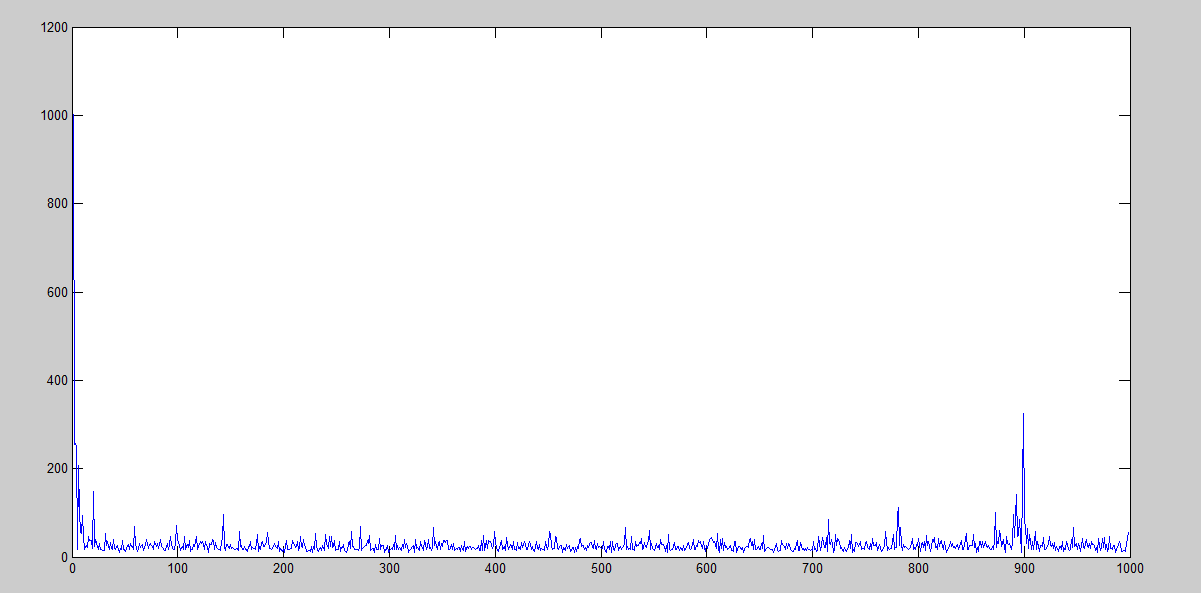
We can finally see here that the performance is way better, but still it gets worse after 875th iteration. Nonetheless, what is it being done when it starts to grow up again? In terms of the amount of iterations, we can see that peak here:
If we check what is going on in the state transition, we will find that it is stuck and it will be stuck until a random number lower than ɛ is generated, and therefore, try another solution.
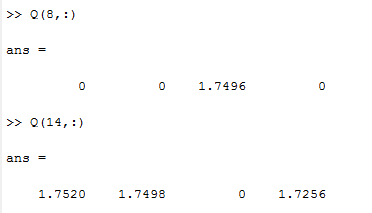
When it starts to get worse, we can stop the general iteration and check the S(a,b) values to understand what happens.
From state 8, the only option the algorithm can perform is doing the third action (going down).
From state 14, the best option is the action number 1, which means going up. Note that the correct action (left) is slightly worse: 1.752 – 1.7498 = 0.0022. Note also that that amount is smaller than the learning rate 0.01. If it learns again the correct answer, it will be fixed.
The final solution to this problem was using the following parameters:
ɛ = .3;
α = 0.1;
γ = 1;
maxCounter = 700; % Limit of general iterations
And a small trick: after the 20th general iteration it usually starts to get better, so I will add a small piece of code to tell the algorithm that if it starts to get worse after the 20th iteration, it should stop automatically before it completely messes up the solution.
if counter > 20 && counterIter > 100
finish = 1;
end
Demonstration:
Complementary slides explaining the algorithm: Sarsa Algorithm
References
1. R. S. Sutton and A. G. Barto. 2005. “Temporal-Difference Learning”, Reinforcement Learning: An Introduction. (http://webdocs.cs.ualberta.ca/~sutton/book/ebook/node60.html)
2. http://www.cse.unsw.edu.au/~cs9417ml/RL1/tdlearning.html
Recently I was reading about Monte Carlo and I decided that I had to implement one of its versions before going further to the next chapter in order to fully understand it. Personally Monte Carlo was a bit hard to understand because it’s not a simply algorithm or bunch of algorithms, but a general framework of solving problems instead. Finally, after reading the corresponding chapter [1] I went down to work and started to think and design a toy problem in Matlab.
Matlab design explanation
The most interesting thing is that I developed it very generically: you can set the start and goal state and generate a customized configuration of the walls (or randomized, or no walls at all). It only have the condition that you can only use 36 states, which I considered enough for a simulation.
I faced two problems when developing this algorithm. The first one made me lose roughly one hour since I was using relative values to draw the elements, but I finally changed to pixels because I can have an exhaustive and exact control about the size of each square. The second problem was the orientation. My mind was quite messed up thinking what should be better. The choices were: being the (1,1) element the square in the left-bottom corner (as it’s usually in the graphs that I’m used to), being the (1,1) element the square in the left-top corner (easier to deal with matrices in Matlab), and in this last case, should the first element of the matrix be the vertical distance (as it’s in the matrices in Matlab) or should I follow my intuition with the graphs? At the end, I decided to follow Matlab matrices. However, I had another small problem: when drawing in Matlab the annotation, you usually have to start from bottom to top, unlike the matrices’ indexes which start from top to bottom.
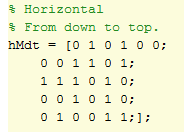
The first grid clearly represents the maze, whereas the second one indicates the current V(s) value of each state. Back to the representation of the maze, here you can see the matrix I used for store whether or not you face a wall (and therefore you can go further).
In this case, I followed the Matlab way to draw annotations, and the first row of the matrix represents the last row in the maze. As you can see in the last horizontal row of the maze, in the first, third, fifth and sixth, you don’t have any wall at all (represented as a 0 in the matrix), and so on.
The beauty of this algorithm lies in that using this two matrices and given the state or position you are, you can easily determine which states you can reach. I simply made 4 cases for up, down, left and right movements, taking special care about the borders.
The Monte Carlo algorithm
Based on this algorithm, I slightly modified it to adapt the requirements of this particular problem. In the first-visit algorithm, you have to find the first time that each state appears given an episode (for many episodes). After you find it, you have to take that particular reward or return and average it with the rest of them. In this case, I think it is not necessary to average anything, since I just want to get the minimum value. My V(s) matrix starts having a 36 value in each cell (because 36 is big enough and it’s the total amount of states).
Generating an episode
I used a ɛ-greedy version, meaning that there is a small probability ɛ that I don’t choose the best option but a random action instead. Generating an episode is quite easy: I start always in the state 1 (or 1,1 position). In the loop which lasts until I reach the state 36 (6,6 position) I call a function “pickActions” which gives me a Nx2 matrix where N is the amount of options and the columns are: state V(s). This matrix is sort by V(s) so that the best options (the minimum V(s) value) are in the top. After this, I take a random number and check it whether ɛ is bigger than that number. If ɛ is lower than the random number (most of the cases since it usually takes a value of .1 or so) I take a random option among the best actions I can do. If it’s not, I randomly pick up another action.
Time to learn
When the episode is generated, it’s time to learn. I perform a loop over the 36 different states in order to find the last of the them (or the first if I flip the vector). After I get its position, I subtract it from the length of the vector. Why I do this? It’s easy to see:
The last element will be 36, so if I subtract its index to the total length, the value will be 0, which is the highest reward. The previous element, will have a reward of 1, which is the second best reward, and so on. Then, I just need to choose the minimum value: the current value of this state or the new value I just calculated it.
After that, I only have to update the V(s) matrix and depict it. Interestingly, I can have the best solution after the 3rd episode (in most of the cases).
One last thing that I have to say is that representing and designing simulations in Matlab gives you the great advantage of using Matlab (quite obvious) but as a disadvantage, Matlab annotations are really really slow. In the next simulation it takes terribly long just because of the graphical representation, in spite of the fact that I split the code into two parts: the first graphical drawing of the mazes, and the rest, to make it a bit faster. When I tried the algorithm without graphical representation, it takes less than 2 seconds to give you the answer.
My first idea was that you can actually see step by step the decisions of the algorithm, but it cannot be easily (and efficiently) done in Matlab, but at least you can see episode by episode.
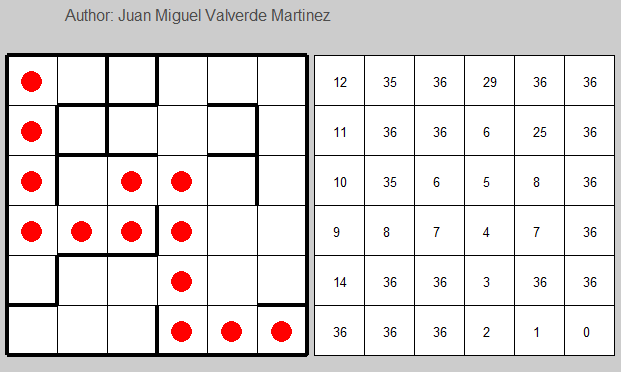
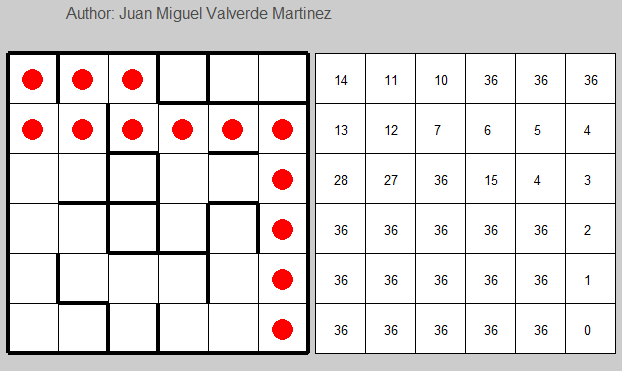
4 Random generated examples solved in 5 or less iterations. The last one is a simple path finder with no walls.
After reading some chapters related to reinforcement learning and some minutes spent watching videos in Youtube about fancy RL robots, I decided to put it into practice. This is the first algorithm I design, so I wanted to keep it simple. Probably I will add later more interesting features and challenges, so this video could be the first of a series of goalkeeper simulations.
It is worth saying that I took the freedom of designing it from scratch, so I haven’t followed any famous efficient algorithm.
The problem
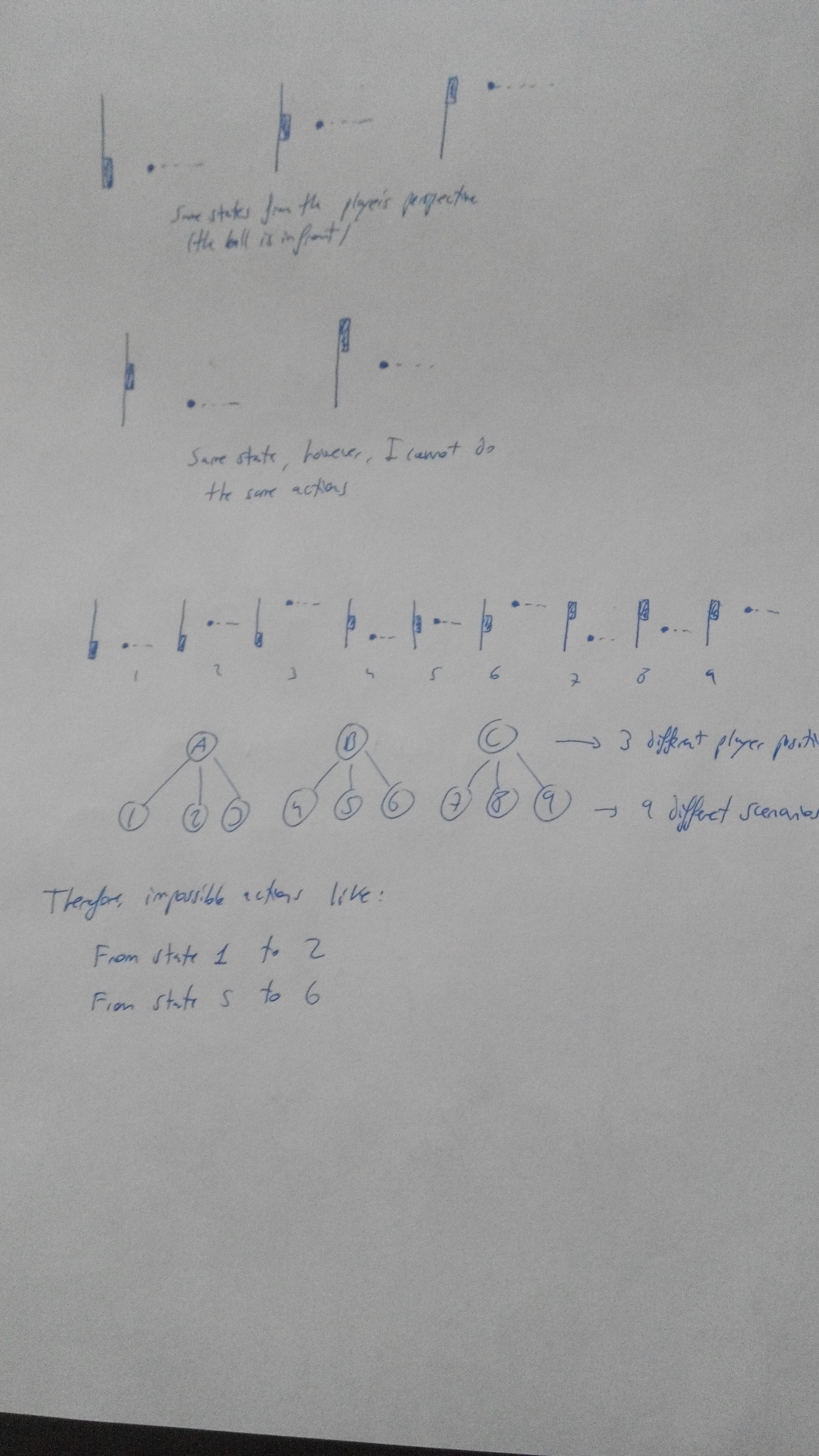
-The ball can come randomly from 3 different heights, so the “player” can move up to 3 different positions. Therefore, I have 9 simple states.
-Goal: catching the ball
Problems I met
The easiest way was designing this problem as a 9 state problems, however I attempted to do it using only 5 states since many of them can be considered the same. However, due to the fact that I cannot simply jump from any of the real 9 states to whichever I want, this assumption is incorrect.
How shall I take into account the fact that I cannot jump to the state I want? Well, I decided to make the algorithm think that doing that action will retrieve a very negative reward. The reward matrix in the beginning looks like this:
Rows represent the current state, and columns the target state, so if the algorithm tries to foresee the reward he thinks he will get when he’s on the state 5 and plans to jump to the state 2, he just needs to retrieve the 5,2 element in the matrix: 2
Why 2? In this algorithm I only have two types of rewards: the good one (+1) and the bad one (-1). After I get a reward, I will update this table, so I will have +1, -1 and -99 entries. If a 2 value remains in the matrix, as it’s the highest value it can has, the algorithm will try to explore that solution (the highest reward is always preferred). I can say that this is a solution based 100% on the exploration part.
States 1, 5 and 9 are the ones which make the algorithm get the highest reward. Considering that from each state I can only do 3 moves (including moving to the same state), there are 3*9=27 possibilities, and for each state there is always one good move, so we have that the maximum errors (scored) are 27-9=18, as we can see in the demonstration.
This is how the reward matrix looks like at the end of the learning: